
SSAP: A Shape-Sensitive Adversarial Patch for Monocular Depth Estimation
Published in IROS, 2024
Core Insight
Monocular depth estimation models rely on global geometric and shape priors, not just local pixel evidence.
SSAP exploits this property to propagate adversarial influence across the entire object, enabling global geometric distortion from a localized perturbation.
Links
- Paper: IROS
Motivation
Modern adversarial attacks primarily target classification and detection systems through pixel-local perturbations.
However, monocular depth estimation (MDE) fundamentally differs: it relies on global consistency and geometric reasoning.
This raises a critical question:
Can a localized perturbation disrupt the entire perceived geometry of an object?
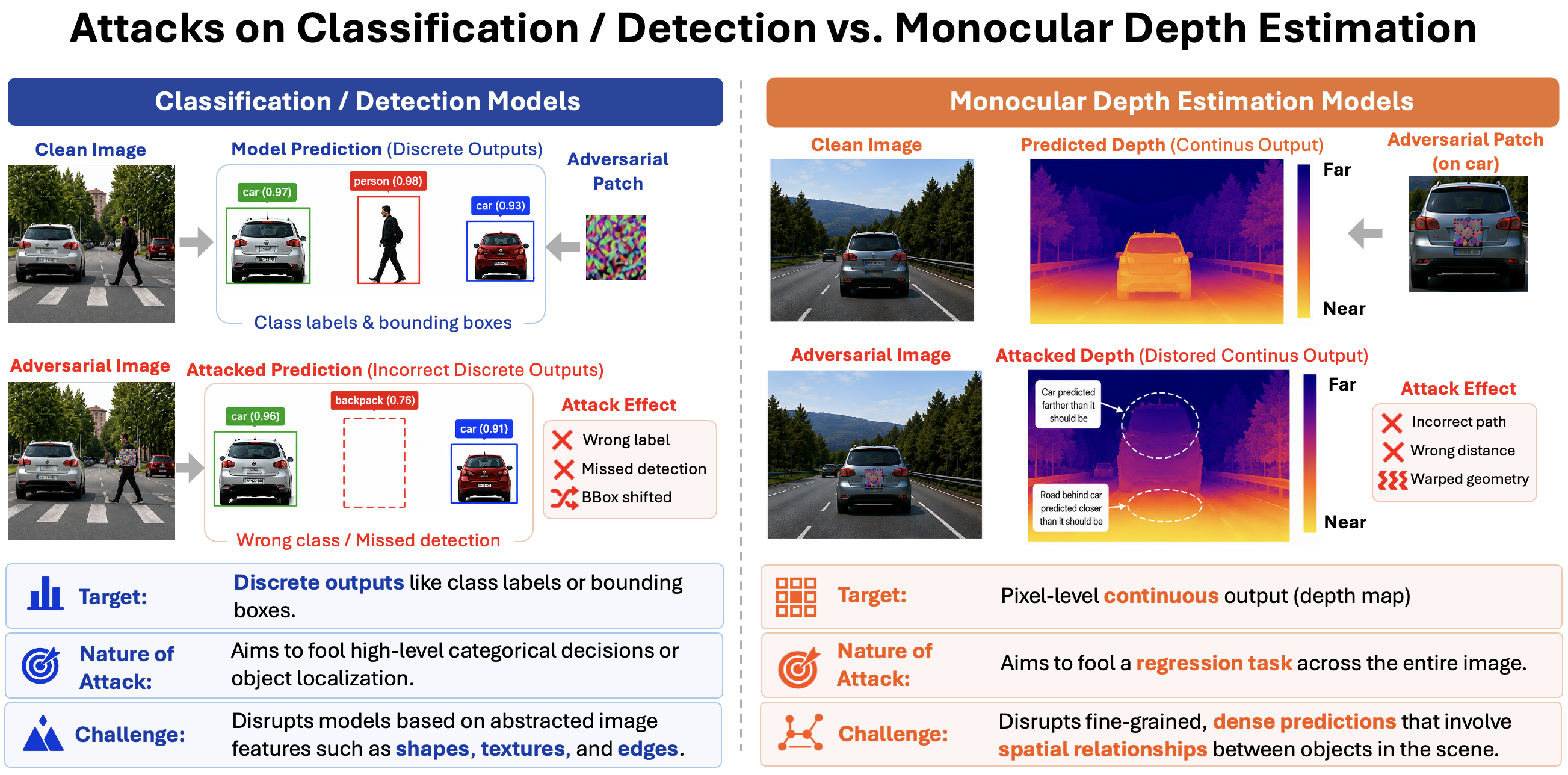
Traditional attacks remain localized, whereas depth estimation depends on global structure.
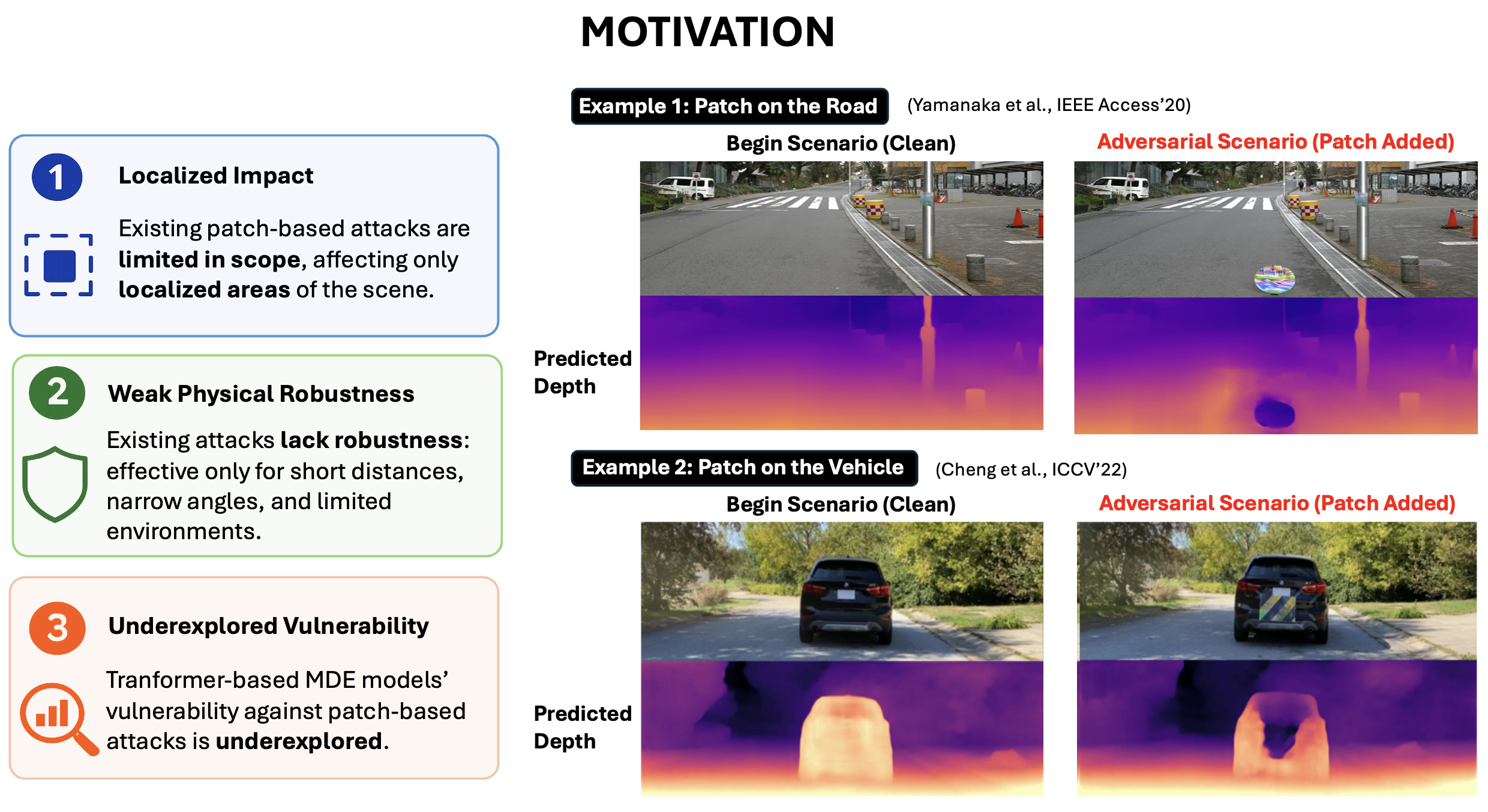
Existing methods fail to exploit shape priors, limiting their impact on geometric perception.
Method Overview
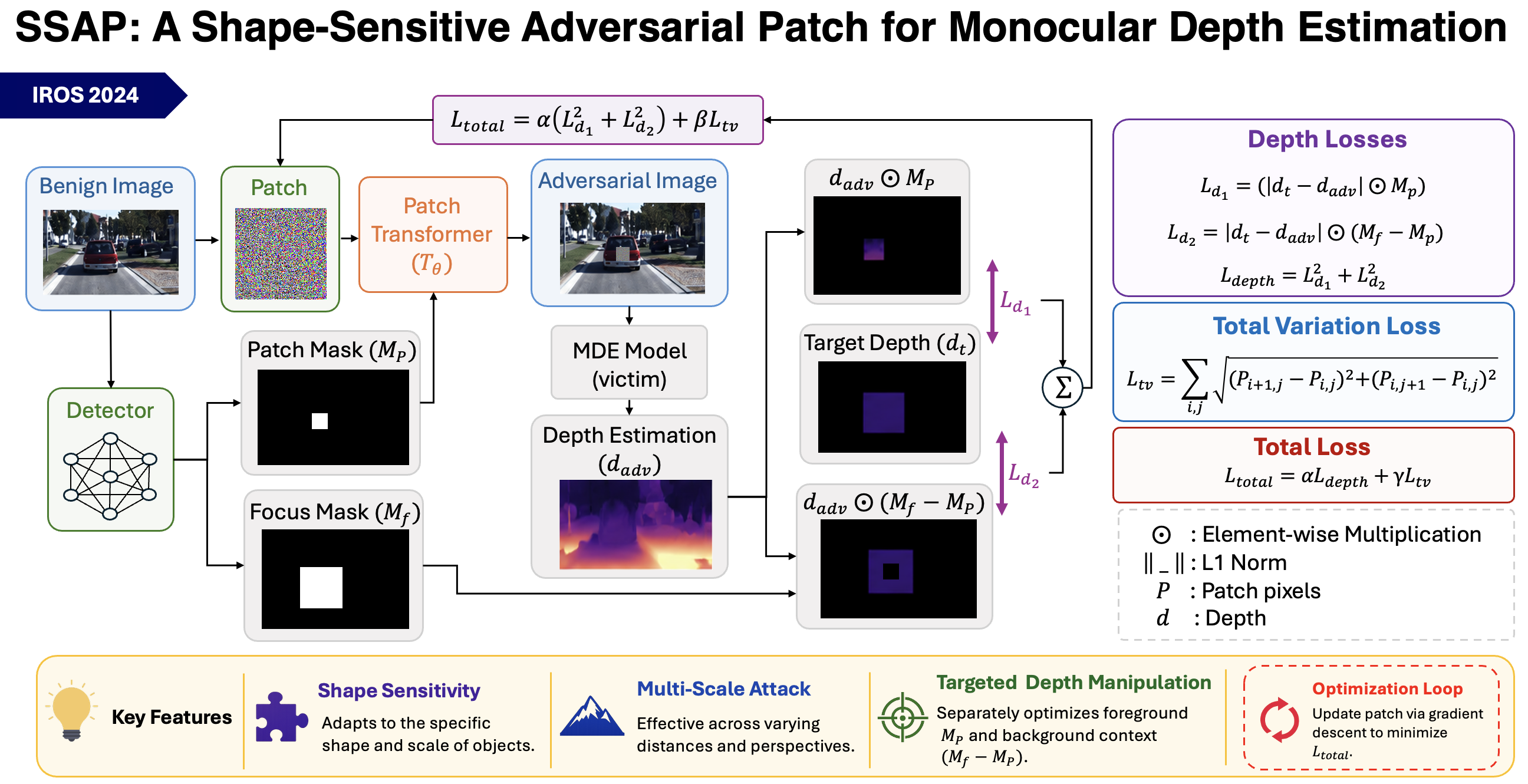
SSAP introduces a shape-aware adversarial optimization framework that leverages object-level priors.
Instead of affecting only the patch region, SSAP:
- exploits structural dependencies in depth estimation
- propagates perturbation influence across the entire object surface
- induces global depth distortion and structural misinterpretation
Abstract
Monocular Depth Estimation (MDE) is critical for autonomous systems, enabling scene understanding and safe navigation. Despite advances in deep learning–based depth models, their robustness to adversarial manipulation remains largely unexplored.
We propose SSAP, a Shape-Sensitive Adversarial Patch that targets the geometric reasoning process of depth estimation models. Unlike conventional adversarial patches that affect only overlapping pixels, SSAP exploits shape priors to propagate distortion across the full spatial extent of the target object.
By optimizing a penalized depth loss under realistic transformations (scale, rotation, viewpoint, illumination), SSAP induces severe depth misestimation and even object disappearance. Across CNN- and Transformer-based architectures, SSAP achieves depth errors exceeding 0.5 while affecting up to 99% of the object region.
These results reveal a critical vulnerability: geometric perception in deep models can be globally manipulated through localized perturbations.
Key Contributions
- First shape-sensitive adversarial patch for monocular depth estimation, moving beyond classification/detection-focused attacks
- Demonstrates global geometric distortion from a local perturbation via shape-aware optimization
- Introduces a penalized depth loss formulation tailored to maximize structural misestimation
- Ensures physical robustness under scale, rotation, viewpoint, and illumination variations
- Validates effectiveness across CNN and Transformer-based depth models
- Reveals severe safety risks, including object disappearance and large distance misestimation
Results
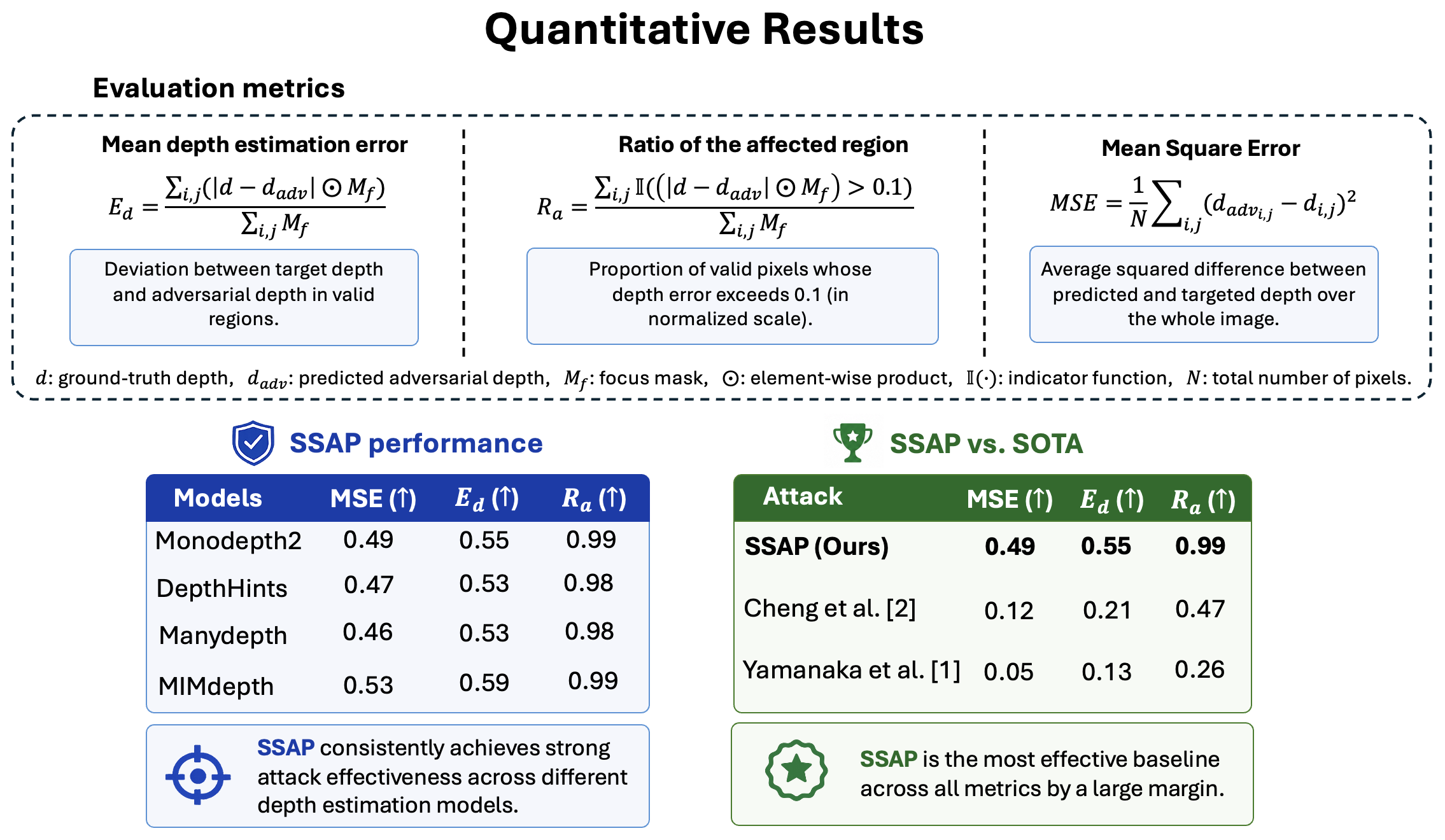
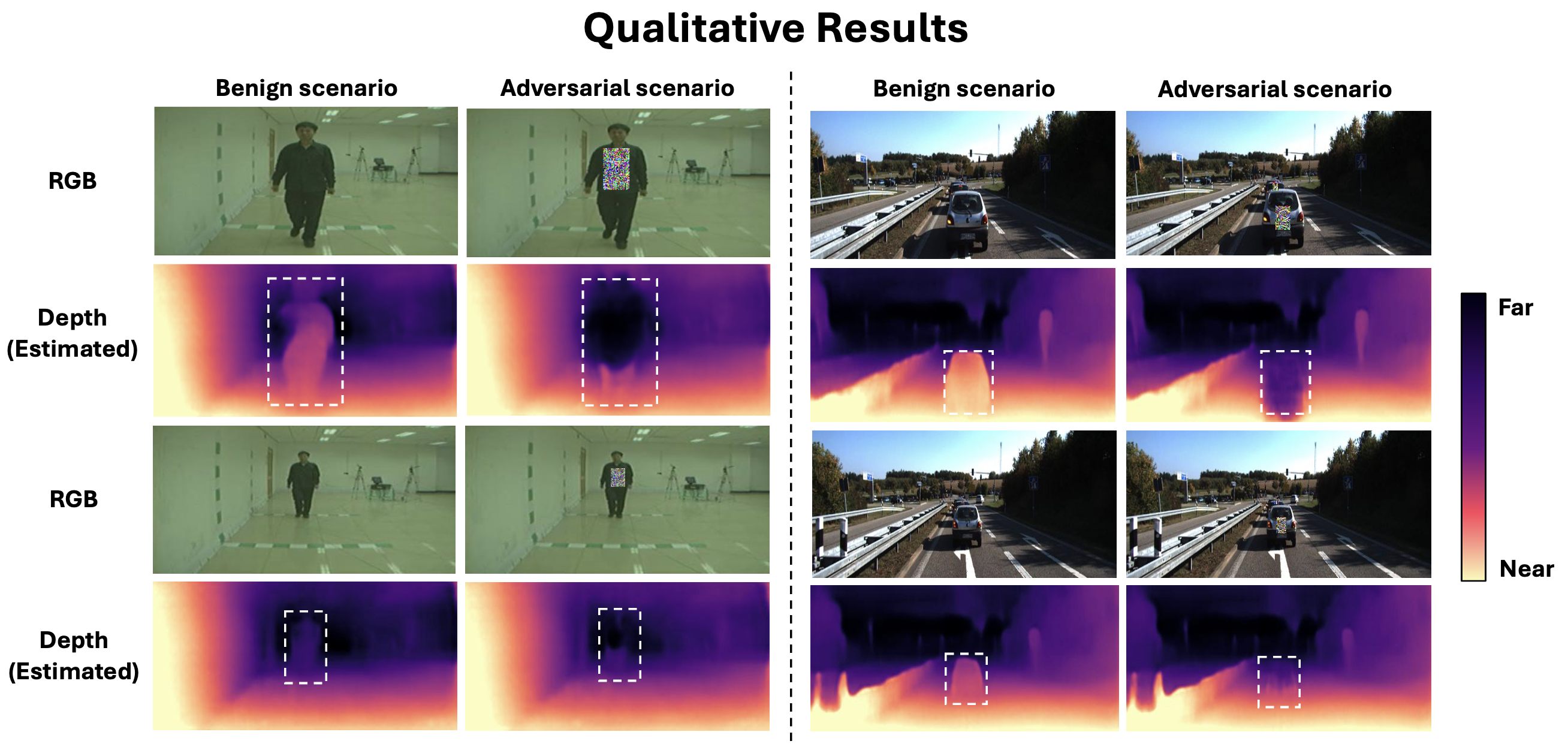
SSAP induces large-scale depth errors, exceeding 0.5 and affecting up to 99% of the object region.
Crucially, the attack is not localized:
- it alters the global geometry of the scene
- causes object disappearance
- leads to severe distance misestimation
These effects highlight a fundamental weakness in depth perception models:
they rely on structural priors that can be systematically exploited.
Why This Matters
Unlike classification errors, failures in depth estimation directly impact:
- Distance perception
- Collision avoidance
- Navigation safety
SSAP demonstrates that:
Deep models do not merely misclassify — they can misinterpret the geometry of the world.
This poses serious risks for:
- autonomous driving systems
- robotics and embodied AI
- real-world perception pipelines
Broader Perspective
This work is part of a broader research direction on:
Understanding how structural priors and representation alignment influence robustness in AI systems
SSAP shows that:
- exploiting structure → enables powerful attacks
- controlling structure → is key to building robust systems
Citation
@inproceedings{guesmi2024ssap,
title = {SSAP: A Shape-Sensitive Adversarial Patch for Comprehensive Disruption of Monocular Depth Estimation},
author = {Guesmi, Amira and Hanif, Muhammad Abdullah and Alouani, Ihsen and Ouni, Bassem and Shafique, Muhammad},
booktitle = {IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
year = {2024}
}